
A real time face recognition system is capable of identifying or verifying a person from a video frame. To recognize the face in a frame, first you need to detect whether the face is present in the frame. If it is present, mark it as a region of interest (ROI), extract the ROI and process it for facial recognition.
Real time face recognition software
This project is divided into two parts: creating a database, and training and testing.
Creating a database.
Take pictures of the person for face recognition after running create_database.py script. It automatically creates Train folder in Database folder containing the face to be recognised. You can change the name from Train to the person’s name.
While creating the database, the face images must have different expressions, which is why a 0.38-second delay is given in the code for creating the data set. In this example, we take about 45 pictures/images and extract the face, convert it into gray scale and save it to the database folder with its name.
Training and testing.
Training and face recognition is done next. face_rec.py code does everything. The algorithm used here is Local Binary Patterns Histograms (LBPH).
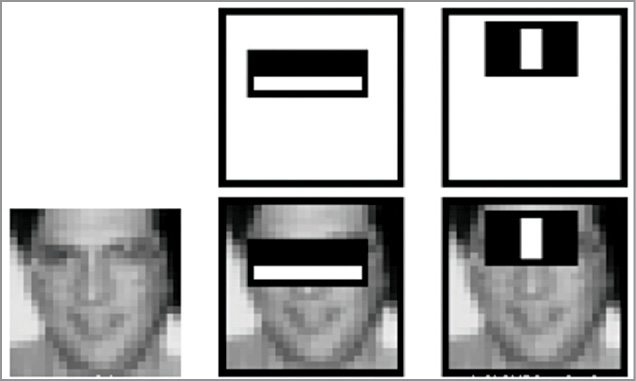
Face detection is the process of finding or locating one or more human faces in a frame or image. Haar-like feature algorithm by Viola and Jones is used for face detection. In Haar features, all human faces share some common properties. These regularities may be matched using Haar features, as shown in Fig. 1.
Two properties common to human faces are:
1. The eye region is darker than the upper cheeks.
2. The nose bridge region is brighter than the eyes.
1. The eye region is darker than the upper cheeks.
2. The nose bridge region is brighter than the eyes.
Composition of two properties forming matchable facial features are:
1. Location and size including eyes, mouth and bridge of nose
2. Value for oriented gradients of pixel intensities.
1. Location and size including eyes, mouth and bridge of nose
2. Value for oriented gradients of pixel intensities.
For example, the difference in brightness between white and black rectangles over a specific area is given by:
Value = Σ (pixels in black area)- Σ (pixels in white area)
The above-mentioned four features matched by Haar algorithm are compared in the image of a face shown on the left of Fig. 1.
Testing procedure
Install OpenCV and Python on Ubuntu 16.04.
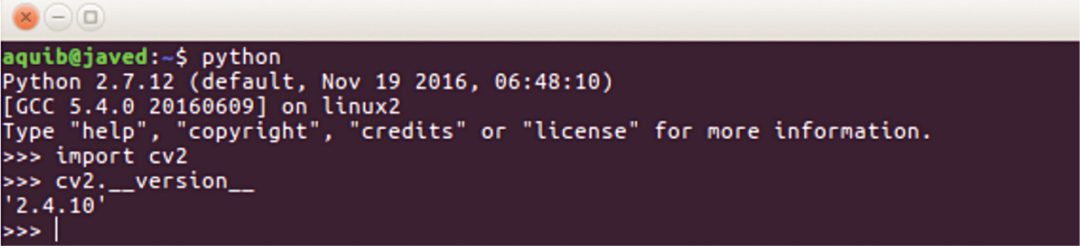
The project was tested on Ubuntu 16.04 using OpenCV 2.4.10. The following shell script installs all dependencies required for OpenCV and also install OpenCV 2.4.10.
[stextbox id=”grey”]$ sh ./install-opencv.sh[/stextbox]
After installing OpenCV, check it in the terminal using import command, as shown in Fig. 2.
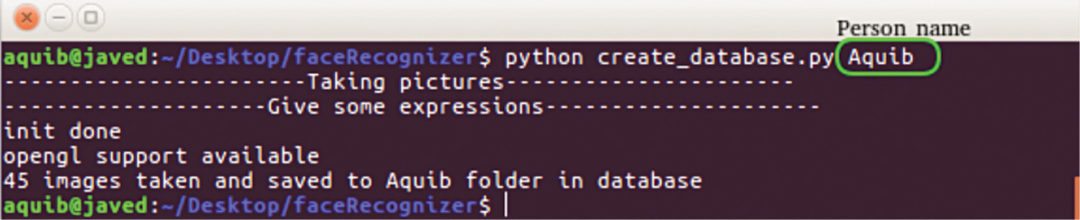
1. Create the database and run the recogniser script, as given below (also shown in Fig. 3). Make at least two data sets in the database.
[stextbox id=”grey”]$ python create_database.py person_name[/stextbox]
2. Run the recogniser script, as given below:
2. Run the recogniser script, as given below:
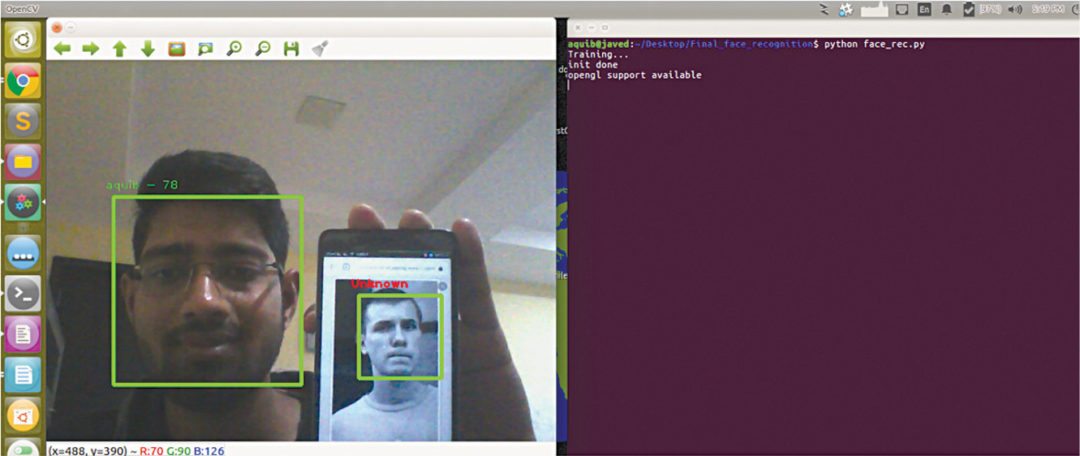
[stextbox id=”grey”]$ python face_rec.py[/stextbox]
This will start the training, and the camera will open up, as shown in Fig. 4. Accuracy depends on the number of data sets as well as the quality and lighting conditions.
OpenCV 2.4.10.
OpenCV provides the following three face recognisers:
1. Eigenface recogniser
2. Fisherface recogniser
3. LBPH face recogniser
1. Eigenface recogniser
2. Fisherface recogniser
3. LBPH face recogniser
In this project, LBPH face recognition is used, which is createLBPHFaceRecognizer( ) function.
LBP works on gray-scale images. For every pixel in a gray-scale image, a neighbourhood is selected around the current pixel and LBP value is calculated for the pixel using the neighbourhood.
After calculating LBP value of the current pixel, the corresponding pixel location is updated in the LBP mask (it is of same height and width as input image.) with LBP value calculated, as shown in Fig. 5.
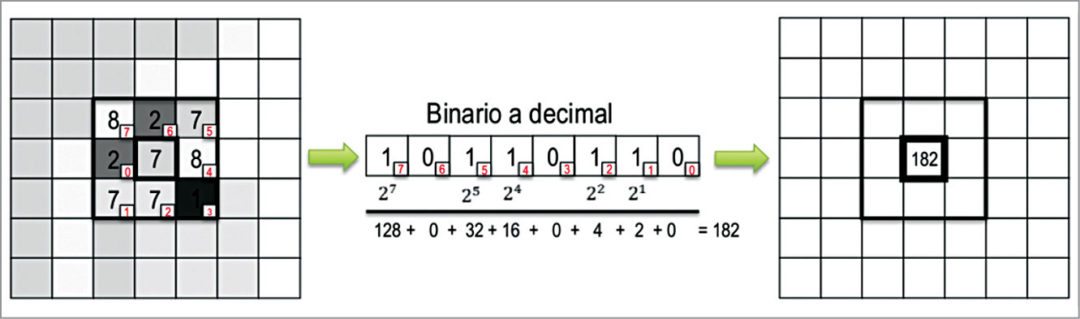
In the image, there are eight neighbouring pixels. If the current pixel value is greater than or equal to the neighbouring pixel value, the corresponding bit in the binary array is set to 1. But if the current pixel value is less than the neighbouring pixel value, the corresponding bit in the binary array is set to 0.


No comments:
Post a Comment